
360全景泊车是通过安装在车身前后左右的4个超广角鱼眼摄像头同时采集车辆四周的图像,经过算法合成、图像视图去畸变校正和原图、拼接和融合后,形成一幅车辆四周的 360度旋转可视车辆周围安全图像实时传送到中控显示屏上,使驾驶员通过显示屏可以直观查看车身周围环境,地面存在的视图盲区,可以帮助驾驶员清楚确认车辆周围是否存在障碍物,帮助驾驶员轻松应对复杂路面和停泊车辆。
产品特性:
开机环绕3周,周围情况一目了然;
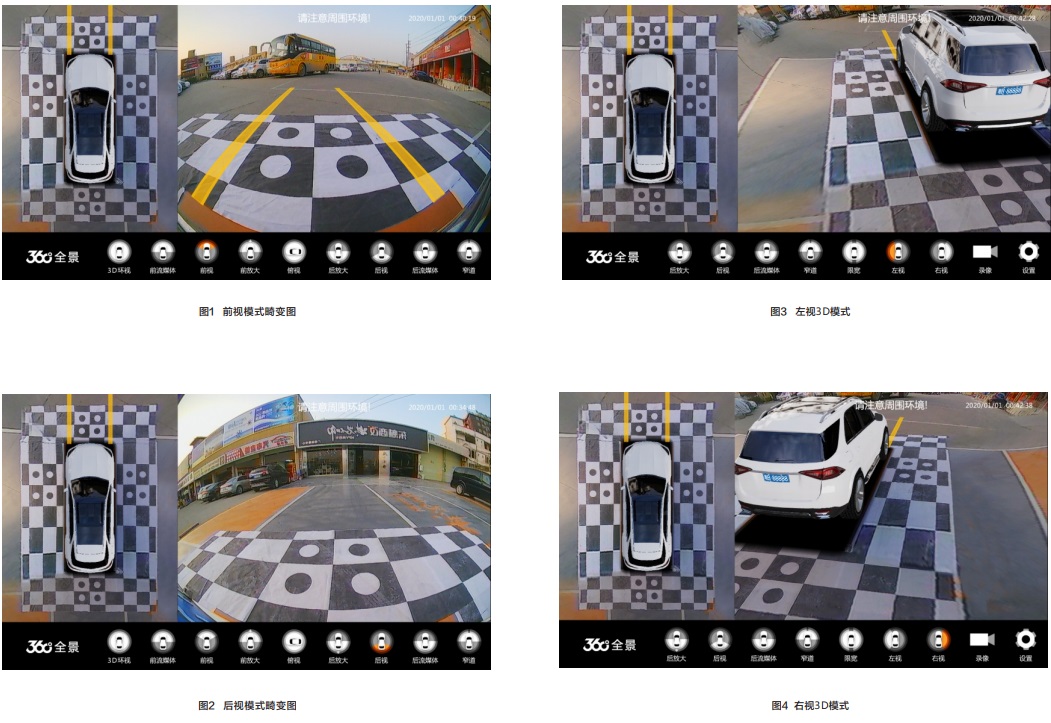
支持2D全景、3D全景、模式切换,前后左右/前/后流媒,限宽,窄道,等模式切换;
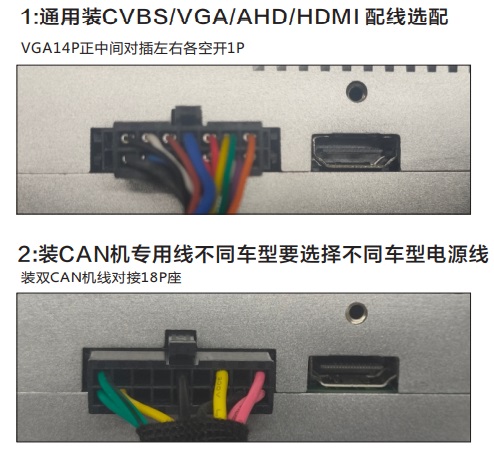
选配功能支持内置单双CAN机器安装;
支持AHD, CVBS, VGA,HDMI多种输出接口信号格式,软件一键切换;
支持多种布一键标定,且无需人工描点,地面无有盲区;
4路影像实时行车记录,本地回放四路AHD高清信号输入,画质清晰流畅窄路实时 路况,行车更安全。
产品规格:

主机及配件简介:

主机接口:
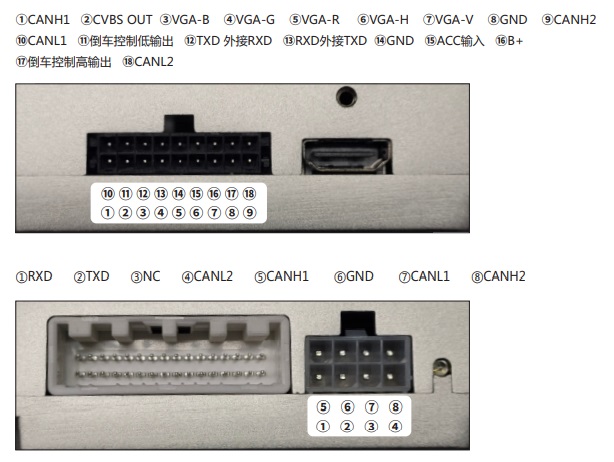
主机及主线束的相关接口:
主控线:连接电源(黄色线接常电、红色线接ACC、黑色线接地)
延长线上各红色小线:分别接左、右转向灯和倒车灯正极
黑色宝马接头:连接前方摄像头
黄色宝马接头:连接后方摄像头
红色宝马接头:连接左侧摄像头
蓝色宝马接头:连接右侧摄像头
黄色AV接口:主机视频CVBS输出接口,通过视频延长线连接到中控CVBS倒车视频通道显示
蓝色AV接口:主机视频AHD输出接口,通过视频延长线连接到中控AHD倒车视频通道显示
棕色DVD触发线:连接导航倒车检测线
黄色RF天线,接收旋钮操控器信号
6PIN接口:主机VGA视频输出接口,连接VGA解码器,通过解码器连接到原车屏(需原车支持)
USB接口:连接U盘,可用于行车记录、系统升级、参数存储
OBD/CAN接口:部分车型插原车OBD,部分车型接网关或主机CAN线,具体按系统设置-设置车型菜单的提示
指示灯:主机红灯闪烁代表工作正常,绿灯闪烁代表能接收到操控器信号。操作操控器,绿灯无闪烁,请检查操控器是否安装电池或配对成功
连接示意图:
产品视图:
 扫码添加企业微信好友
扫码添加企业微信好友
 扫一扫关注公众号
扫一扫关注公众号